大会で「特別賞」に輝いた本学のロボットをご紹介します。
「NHK学生ロボコン2023」出場報告
NHK学生ロボコンは、全国の学生チーム※1が自作ロボットのアイデアや技術力を競い合う大会で、優勝チームには、世界有数のロボット競技会である「ABUアジア・太平洋ロボットコンテスト※2」への出場資格が与えられます。東京工科大学は、10年以上前からこのロボコンに挑戦し、2016年からは6大会連続で本戦に出場している “常連校”のひとつ。前回まで2年連続でベスト4に進出しており、2023年は初優勝を目標に掲げました。
今大会の競技課題は、世界遺産のアンコールワット寺院に見立てたステージで行われる「輪投げゲーム」。1チームが「ぞう」と「うさぎ」の2台のロボットを操り、11本のポールにリングを投げ入れて得点を競うもので、スピードや正確性だけでなく、的確な戦略が勝敗の重要なカギを握ります。
本学は、書類とビデオによる事前審査を通過して7大会連続8回目の本戦出場を果たし、2023年6月に大田区総合体育館で開催された大会本番に、シードチームとして臨みました。予選リーグ第1試合は新潟大学と対戦し、開始早々から順調に得点を重ねて210対20のスコアで快勝。第2試合の横浜国立大学戦は一進一退の大接戦となり、最後は相手チームが8つのポールの最上部にリングを入れる「チェイヨー」を決めて終了しました。惜しくも目標に届かなかった本学ですが、測域センサーや全方向移動機構などを実装した高い技術力と射出精度、優れた競争力が評価され、協賛企業のSMC株式会社より「特別賞」が授与されました。
なお、当日の本学チームの奮闘ぶりは、以下の動画でご覧いただけます。ぜひお楽しみください!
※1: 2023年大会は39チームがエントリーし、22チームが本線に出場
※2: 2023年大会はカンボジアの首都プノンペンで開催

NHK学生ロボコン2023 大会報告の動画はこちら
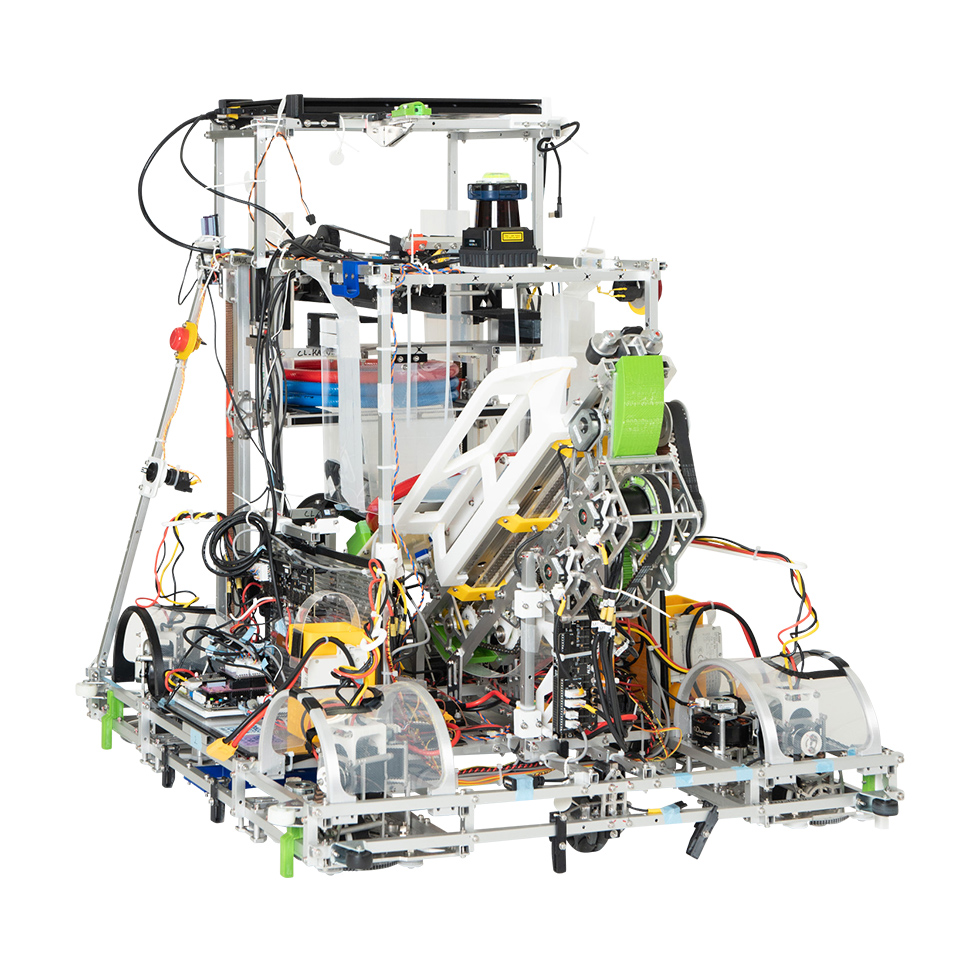
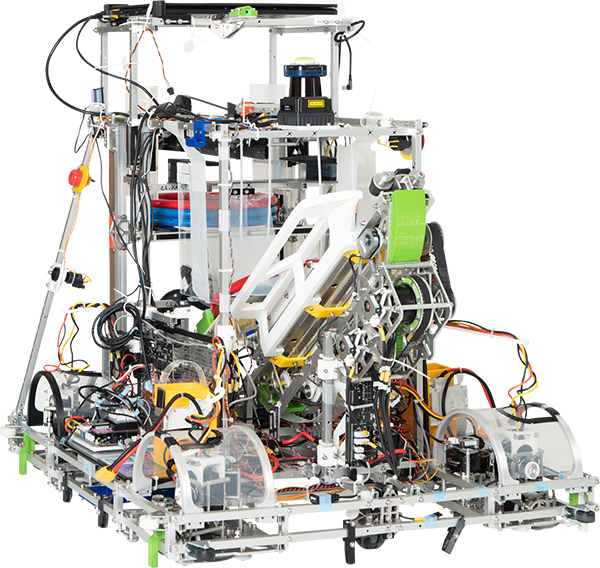
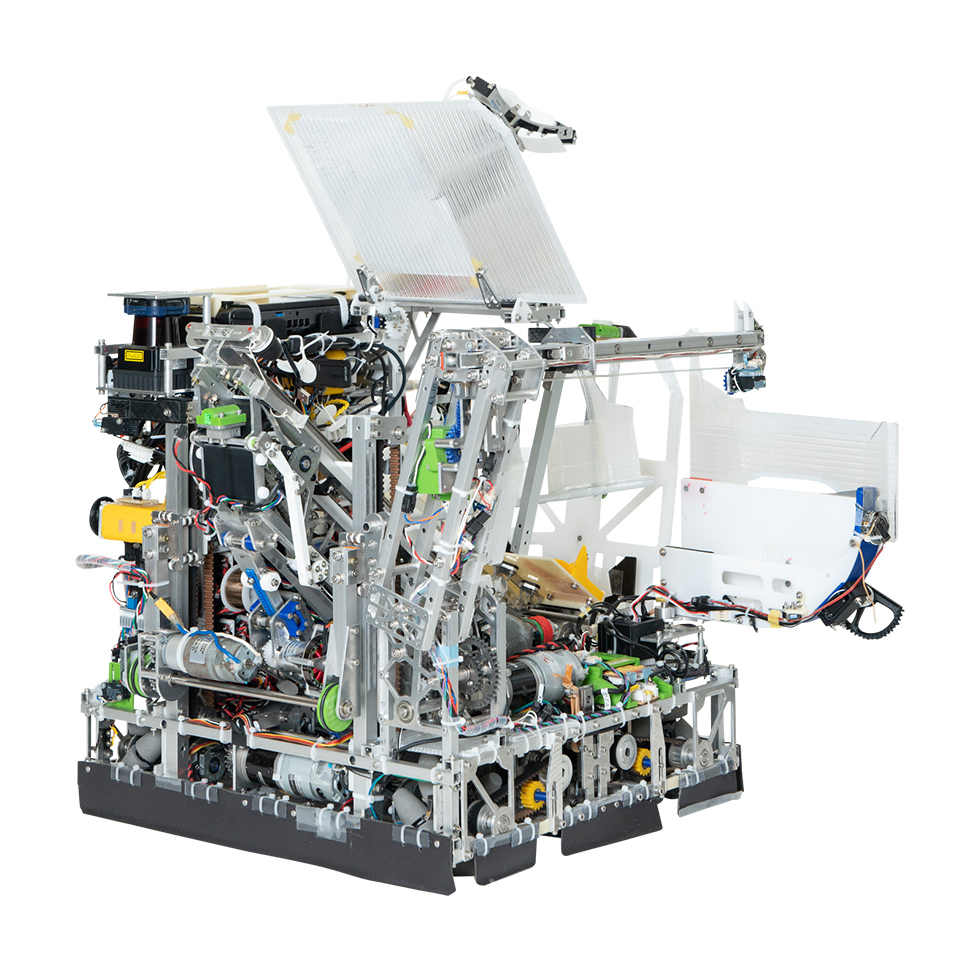
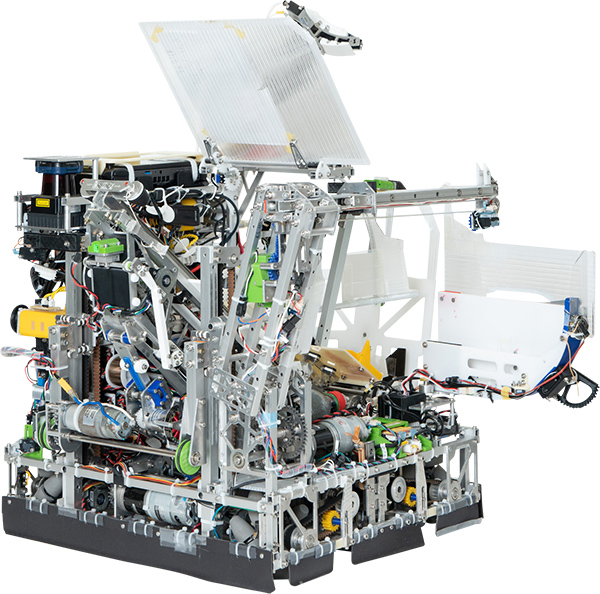
NHK学生ロボコン2023出場ロボットの紹介

高度な機構を、目一杯詰め込みました!
苦労したのは、機能や性能を犠牲にしないで、規定内のサイズ・重量に複雑な機構を収めること。コンパクトな機体に多彩な技術と本学の知恵や経験が詰まっています!

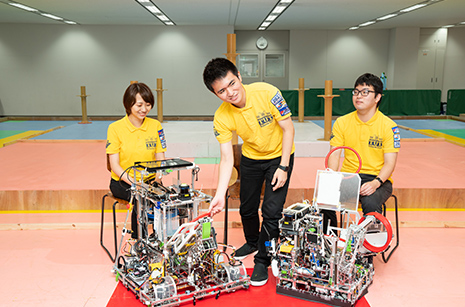
チームの主役は、ゼロから始めた学生たち
メンバーは、もともとロボットの知識ゼロの者ばかり。入学後、先生や先輩、大学の充実したサポートを受け、本気で頂点に挑む経験ができる。それが本学チームの魅力です
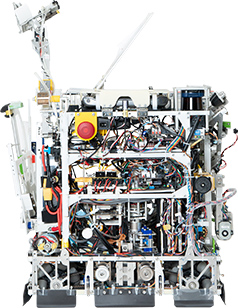
ぞうロボットについて
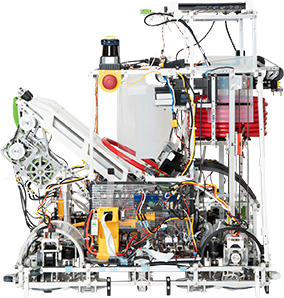
「競技フィールドの中心部から一番離れたエリアから得点を狙うロボットで、11本のポールすべてにリングを素早く、正確に投げ入れる能力が求められます。今回製作したロボットは、モーター駆動の操舵であらゆる方向に俊敏に移動できる『駆動操舵式全方向移動機構』をチームとして初めて採用し、これまでの本学の課題だった高速化を実現しました。そのほか自動操縦やリング射出速度の自動制御など、操縦者の負担を軽くしながら確実に得点を重ねるための、先進的な技術を全身に搭載しています」 (梅村)

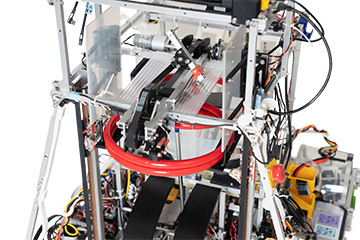
POINT1 射出機構
「ポールの位置などを検知するセンサーのデータをもとに、自動で照準を合わせてリングを飛ばします。動力には応答性の良いモーター2基を用い、遠方のポールも狙うことができます。リングを乗せる皿の形状や素材を何度も変更し、動画による動作解析を重ねて、精度に磨きをかけました」 (安達)
POINT2 回収機構
「試合開始とともに、フィールドに立てて置いてあるリングの束に棒を通すように機体を走行させ、10本以上のリングをまとめて取り込むことができます。回収の安定性とスピードの両方に優れ、大会本番の2つの試合では、期待通りほぼパーフェクトな働きをしてくれました」 (梅村)
POINT3 装填機構
「回収後、機体の中で横向きに重なっているリングを、1つずつ射出用の皿の上に送り出す機構です。最上部の1本だけを2つの爪が付いたパーツで押し出すのですが、確実に動作させるためには非常に微妙な調整が必要で、残念ながら本番ではトラブルに悩まされました」 (安達)
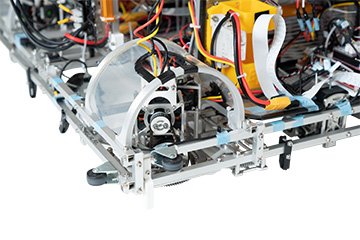
POINT4 移動機構
「4輪の向きをモーターで変えられる『全方位移動機構』を初めて実装しました。これにより高速化が図られる一方、手動での運転制御が難しくなるため、自動操縦技術を組み合わせています。本番では、センサーの不調で本来の性能を披露できませんでしたが、来年以降のロボットにきっと生かせるはずです」 (梅村)
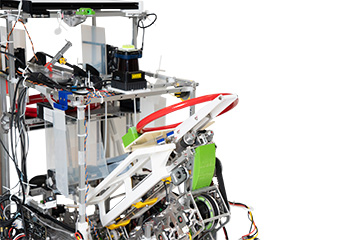
うさぎロボットについて
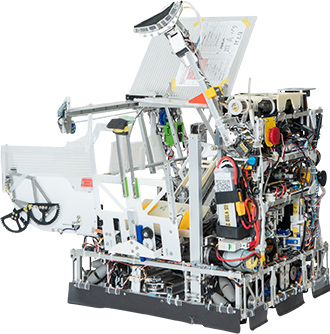
「フィールドの内側のエリアからポールにリングを投げ入れて得点を狙うロボットです。中央部の一段高くなっているエリアにまで進入し、相手チームが投げたリングをブロックしたりして妨害することもできます。しかし、この妨害機構を小さな機体で実現することは技術的に簡単でなく、実際に採用したのは本戦に出場した22チームのうち数チームだけでした。『優勝するためのロボットづくり』を基本コンセプトに開発した本学チームのうさぎロボットは、その数少ない妨害機構を実装した一台です」 (赤崎)


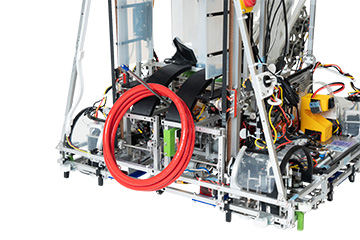
POINT1 回収機構
「ぞうロボットと同じように機体を移動させながらリングに捧を通して取り込むもので、同時に20本を回収することが可能です。ルール上、うさぎロボットは試合中に水平面のサイズを700mm以上に伸ばすことができないので、本機は機体の横に平行展開する棒で回収する設計としました」 (安達)

POINT2 射出機構
「うさぎロボットは、至近距離から遠距離までのポールを狙える能力が求められます。そこで本機は、射出角度を上下・左右(ピッチ角・ヨー角)の向きに調節できる機構を設けました。照準合わせは自動化されており、操縦者は狙うポールを選んでボタンを押すだけで正確な射出が行えます」 (赤崎)

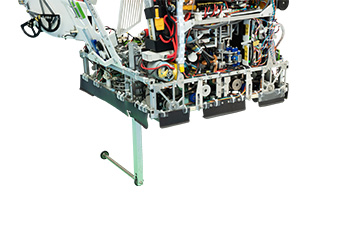
POINT3 段越え機構
「競技フィールドのセンターエリアに進入するために、前部の車輪と後部の上下可動パイプを使って機体を200mm上昇させて前進させる機構です。一見、トリッキーな動きですが、実際は非常に安定してスムーズに動作する、信頼感あるメカニズムを実現できました」 (安達)
POINT4 妨害機構
「1本のリングをつかんだアームをポール上に伸ばし、得点を狙って飛んでくる相手のリングをブロックする機構で、接戦を制する切り札として開発しました。リングの回収・装填機構との干渉を避けながら、確実に動作するよう仕上げることに、製作メンバーは最後まで苦労しました」 (赤崎)



優勝を目標に、2台のロボットを製作
今回の輪投げゲームは、「ぞう」と「うさぎ」の2台で競います。私たちは、初優勝を目標に緻密な戦略を立てたうえで、本学らしい独創性ある機体を作り上げました