大会でベスト8&アイデア賞に輝いた本学のロボットをご紹介します。
「NHK学生ロボコン2024」出場報告
NHK学生ロボコンは、全国の学生チームが自作ロボットのアイデアや技術力を競い合う大会で、優勝チームは「ABUアジア・太平洋ロボットコンテスト※1」への参加資格が与えられます。東京工科大学は、NHK学生ロボコン2024に、8大会連続となる出場を果たしました。
2024大会は「米の収穫」をテーマに、1チーム2台のロボットで、田植えから米の収穫・収容までを模した競技を実施。2台のロボットのうち1台は完全自動化が義務づけられるなど、例年以上に高度な技術力と戦略性が求められました。
本学の「プロジェクトR」は、事前審査を通過して、2024年6月に東京工科大学蒲田キャンパス内の日本工学院アリーナで開催された大会本番に、シードチームとして臨みました。
予選リーグ第1試合は、180対60のスコアで九州大学に快勝。第2試合では、2台のロボット間で籾(ボール)を受け渡す離れ業を成功させ、260対190で金沢工業大学に勝利しました。
準々決勝では、270対400で東京農工大学に惜敗しましたがアイデア賞を受賞しました。
大会当日の様子を、以下の動画で、ぜひお楽しみください!
※1: 2024年大会はベトナムで開催

NHK学生ロボコン2024 大会報告の動画はこちら
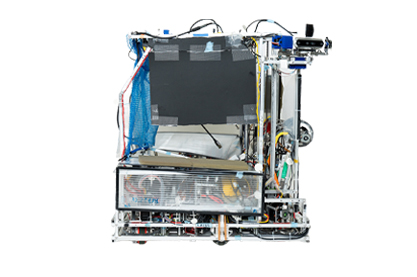
2024年大会出場ロボットの概要




大会の規定に従い、R1とR2の2台のロボットを製作しました。R1は操縦者がつく半自動ロボットで、苗を植えたり、籾を収穫して、ストレージ(貯蔵)ゾーンに移したりする役割を担います。R2は全自動化ロボットで、ストレージゾーンにある籾を回収してサイロ(倉庫)に入れることを役割とします。
今回のルールでは、いかに早く籾をサイロに入れるかが重要なポイントとなるので、両機とも「速さ」の追求にこだわりました。また、従来に比べ多くのオブジェクト(苗と籾)を扱う競技なので、たくさんの動作を常に安定して正確に実行できることも重視しました。さらに試合を有利に運ぶために、R1からR2へ籾をパスする機構を搭載したことも大きな特長です。このような独創的アイデアを実装することは本学の伝統であり、今回のロボットの見どころのひとつです。
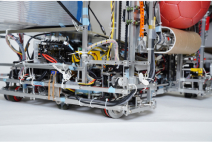
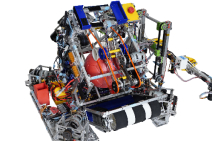
R-1ロボットについて
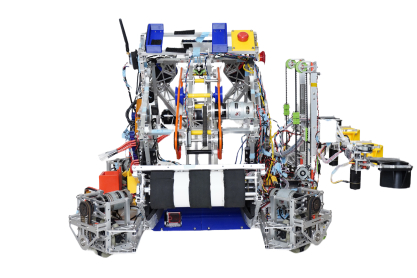
R1に求められる役割のひとつは、ラックにある12本の苗(パイプ状のオブジェ)を取り出してプランティングゾーンに植えることです。本機は6つのハンドで6本の苗を同時に回収する機構により、作業の効率化を図りました。また、12個の籾(ボール)を回収し、ストレージ(貯蔵)ゾーンに射出したり、R2にパスする機構も備えています。複雑・高度な機構としたことで、挙動が不安定になるという問題も生じましたが、改良と調整を重ねた結果、本番ではほぼ想定通りの動作を成功させることができました。



POINT1 苗回収機構
サーボモーターを用いたハンドで、一度に6本の苗を回収可能。12本の苗が入ったラックと、苗を植えるゾーンの間を往復する回数が2回で済みます。ハンドの振動を抑えるために何度も調整を繰り返しました。
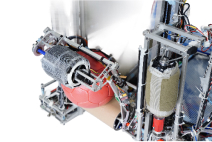
POINT2 籾回収機構
ローラーを高速回転させて籾に近づくことで、機体内部に籾を素早く取り込みます。浅い溝にはまった状態で置かれている籾を確実に回収するために、回収機構の根元部分をフレキシブルな構造としました。
POINT3 籾装填機構
ゴムでできたチューブ状のパーツを用いて、シンプルな動きで素早く籾を射出機構に装填できます。開発当初はゴムのパーツが外れやすかったのですが、構造と形状を工夫することで問題を解決しました。
POINT4 籾射出機構
ローラーの回転により籾をストレージゾーンに射出したり、R2にワンバウンドで渡します。籾とローラーの接点を3点にすることで射出精度を高め、本番でも2機間での籾の受け渡しを成功させました。

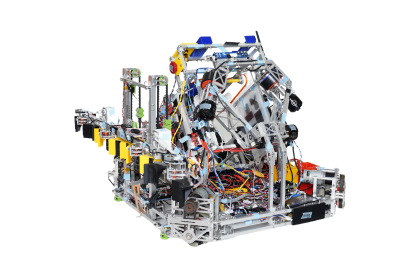
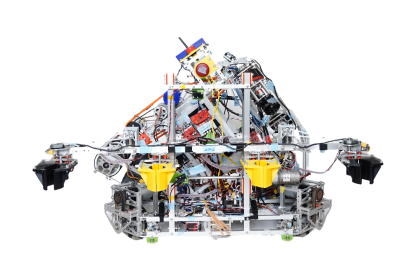
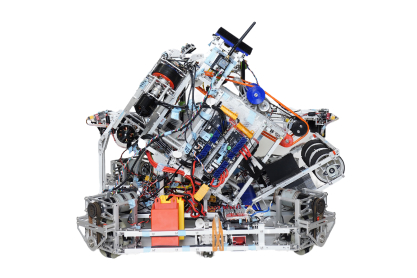
R-2ロボットについて
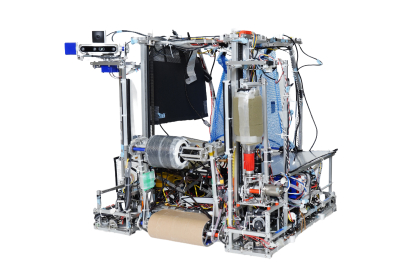
全自動機であるR2は、試合開始とともにフィールドの一番奥のゾーンに移動して、籾(赤・青のボール)を回収し、サイロ(倉庫)に入れて得点します。本機は、カメラで籾を認識して最適な順番で回収し、状況に合わせてサイロを選択して入れることができます。また、R1から射出された籾をワンバウンドでキャッチしたり、得点にならない空籾(紫のボール)をどかす機構も備えています。高度な自動運転や、全方向への高速移動など、本学にとってほぼ未経験の技術を導入した挑戦的な機体です。


POINT1 籾回収・昇降機構
ローラーで籾を回収後、回収部分の角度を変えて昇降させることで、サイロ(倉庫)にスムーズに運び入れることが可能。同じようにR1から射出された籾も、受け取った後、素早くサイロに入れられます。
POINT2 カメラ、ミニPC
対象までの距離を計れるRealSenseカメラと、外光の影響を受けにくいC1カメラという2種類のカメラを使用。機体に搭載したミニPC内の膨大な学習データを用いて、籾の種類や状況を正確に把握できます。

POINT3 移動機構
4輪すべてに、タイヤを回す移動用モーターと操舵用モーターが装着されており、全方向に高速移動できます。移動機構はあらゆるロボットの基盤ですから、本機で培った技術は次年度以降にも生きるはずです。