頂点をめざして開発されたロボットの特長や注目の機構などを紹介します。
「NHK学生ロボコン2021」出場報告
NHK学生ロボコン2021の競技課題は「投壺 ~トゥフー~」。ロボットが矢を壺に投げ入れて得点を競います。ロボコン挑戦プロジェクト「プロジェクトR」は、事前の選考を通過し、本学としては2016年以降、5大会連続通算6回目の本戦への出場です。予選リーグではFグループで筑波大学と対戦。第一試合<20-0>、第二試合<21-1>の対戦成績で勝利し、決勝トーナメントに3位で進出しました。
準々決勝では予選6位の金沢工業大学に<20-1>の対戦成績で勝利し準決勝に進出しました。準決勝では予選1位の長岡技術科学大学にグレートビクトリー<GV-2>で負けてしまいましたが、デザイン賞と特別賞のダブル受賞を果たしました。
なお、大会の様子は以下の動画からご覧になれます。
会場を大いに沸かせた「プロジェクトR」の活躍の様子をぜひチェックしてください!
NHK学生ロボコン2021出場ロボットの紹介
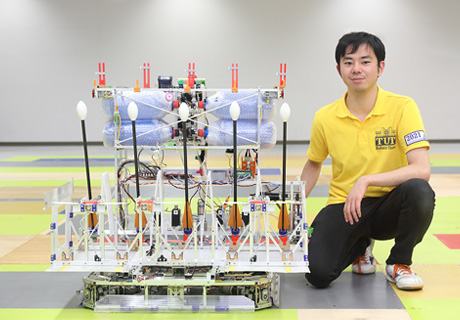
NHK学生ロボコン2021では、矢をポットに投げ入れて得点するスローイングロボット(TR)と、敵の矢が壺に入るのを防ぐディフェンスロボット(DR)の2種類のロボットを各校が製作して競技が行われました。
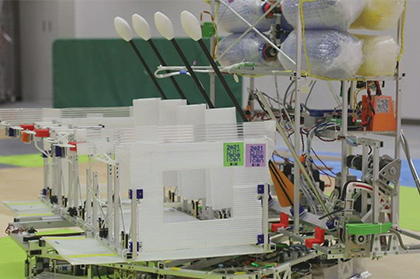
スローイングロボット(TR)について
スローイングロボットにまず求められるのは、狙ったポットに高精度に矢を投げ入れる能力です。開発当初はローラー式の射出機構を考えていましたが、試作機のテストで良い結果が出ず、設計を全面的に変更して圧縮空気を用いる方式を採用。これにより、射出精度は飛躍的に向上しました。本機は、大きな歯車による方位角調整機構と円弧型の仰角調整機構を備えるのに加え、圧縮空気の圧力を変更することもでき、同じ位置から違うポットを狙うことが可能です。また、ラックの矢をスムーズに装填できる独自の機構や、ポットを狙う位置に自動で正確に移動するための測距センサーも装備しています。プロジェクトRが長年培ってきた技術と経験を生かし、多くの改良を重ねることで、信頼性の高い機体となりました。
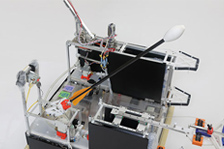
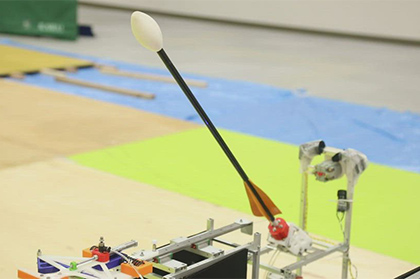
POINT1 空圧射出機構
ステンレス製パイプを矢の尾部から差し込み、内部に圧縮空気を送ることで吹き矢のように射出します。飛距離をコントロールするためには、仰角と圧縮空気の圧力を調整することが必要ですが、射出のパラメーターを見つけるのに苦労しました。
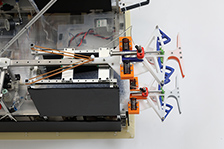
POINT2 回収機構
ラックに設置された矢を、エアシリンダを用いた機構により機体に回収・装填します。5本の矢の尾部に圧縮空気を送るパイプを正確・迅速に差し込むために、機体前部が大きく前後にスライドする仕組みは、他チームに見られない本機独特のものです。
POINT3 旋回機構
機体の上半身全体を左右に旋回させることで、移動せずに狙うポットを変更可能とする機構です。主要部品である直径375㎜にもなる大きな歯車は、学内にある大型の工作機械を利用して自作しました。

POINT4 照準器
ロボットが自動で照準を行ったあとに微調整を行う際に使用します。敵のディフェンスロボットによって動かされたポットに対しても照準を行うことができ、正確に矢をポットに入れることが可能です。

ディフェンスロボット(DR)について
矢の標的となるポットには、固定式のⅠ型と、回転テーブル上に載るⅡ・Ⅲ型があり、ディフェンスロボットの役割はこれらに相手の矢が入らないように防御することです。本学のロボットは、回転テーブルを動かして相手の矢がポットに入るのを防ぐ2種類の機構と、ポット上で矢を振り回して飛んで来る相手の矢をブロックする機構を装備。試合状況に合わせて、これらを臨機応変に使い分けることができます。また、防御だけでなく、自ら矢を射出する機構を備えているのも特長。これにより、試合開始の直後、相手の防御態勢が整う前に矢を射出し、いち早く得点を狙うことができます。小型・軽量化と優れた防御力の両立という難題をクリアし、最終的に制御が容易なシンプルなロボットとして完成しました。
POINT1 I型ポット防御機構
矢をつかんだアームをポット上で回転させ、飛んできた相手の矢を弾き飛ばします。材料は主にアルミフレームですが、一部に3Dプリンターで作製したパーツを使用することでデザイン性や視認性を高めました。
POINT2 ハンドル把持機構
II・Ⅲ型ポットに相手の矢が入るのを防ぐために、回転するポットテーブルのハンドルをつかむ機構です。材料に3Dプリンターパーツとプラスチックの一種であるPOM(ポリアセタール樹脂)を使用して軽量化を図っています。
POINT3 空圧射出機構
スローイングロボットの射出機構を参考にして開発された、圧縮空気を用いて矢を飛ばす機構を実装しています。矢の着弾位置はいくつかのパラメーターによって決まるのですが、それぞれのパラメーターの調整には多くの試行錯誤が必要でした。
POINT4 巻き込み防止プレート
本番を想定した練習を重ねる中で、落ちている矢を巻き込まないようにする必要があることが分かり、開発途中で追加された装備です。3Dプリンターパーツやプラスチック段ボール、ABS樹脂プレートで作られており、破損してもすぐに対応可能です。

学生インタビュー
NHK学生ロボコン2021で快挙を達成したチームの学生2名に、プロジェクトRの魅力や自身の取り組み内容、今後の目標などを語ってもらいました。
小林 亮紘
工学部 機械工学科3年(取材時) プロジェクトリーダー

以前、姉がNHK学生ロボコンに出場したことがあり、私も入学前から本学のプロジェクトRのことは知っていましたが、それほど大きな関心はありませんでした。この気持ちが変わったのは、入学後に実際に学生が作ったロボットを見学し、想像以上に魅力的なマシンであることが分かったから。印象が大きく変わり、すぐにメンバーに加わりました。
私は現在、プロジェクトリーダーを務めています。チームをまとまるために何よりも重視しているのは、メンバーが円滑にコミュニケーションできる環境づくりです。学年や役割が違っても全員が明確な目標を共有し、同じ方向に力を合わせることが勝利のためには不可欠だからです。
2021年大会当日は、多くの注目と実況の声を浴びる会場の空気に緊張しましたが、第1試合は練習の成果を発揮して高得点の勝利を飾り、自信をつけることができました。続く第2・3試合も安定して得点を重ねて快勝。この時点でベスト4という未体験の領域に足を踏み入れ、大きな感動を覚えました。準決勝の第4試合は、強豪相手に力及ばず惜しくも敗退。それでも事前の目標を上回る成績を残し、2つの賞も受賞したことで喜びと満足感を手に大会を終えました。
本学プロジェクトRの最大の強みは、上級生から新入生まで全員がチームのために協力し合える組織力です。また、過去の大会で積み重ねてきた多くの教訓も、ロボットの製作や戦術決定に大いに役立っています。さらに、専用の練習フィールドが用意されるなど大学の手厚いサポートを受けられる点も強力なアドバンテージと言えるでしょう。今後の目標は、本学らしい特徴を生かしつつ、より先進的なプログラミングやセンシング技術を導入していくこと。次代への技術継承をしっかり行いつつ、優勝できるチーム作りを進めたいと考えています。
プロフィール
小林 亮紘
桐蔭学園高校出身(神奈川県)。趣味は艦船のプラモデル作りと博物館巡り。何も考えずに館内をぶらぶら歩けば、勉強やロボコン活動で疲れた心身をリフレッシュできるそう。でも鉄道系の博物館などでは、ついついメカや構造が気になってしまうとか。
梅村 留奈
工学部 機械工学科2年(取材時) 制御回路班所属/操縦担当

私がプロジェクトRに参加したきっかけは、女子メンバーとしてこのプロジェクトで活躍されている先輩に誘われて。全国大会に挑戦できるのは面白そうだし、何より実際に手を動かしてロボットの設計や制御、加工組立を行うことが、機械工学の知識や技術向上に役立つと考えて参加を決めました。
NHK学生ロボコン2021に向けての活動では、私はスローイングロボットの制御を担当し、本番当日は操縦者を務めました。コロナ禍により大会の開催日が遅れた分、練習時間や戦略を練る時間はたっぷり取れたのですが、それでも本番前日は食事が喉を通らないほど緊張しました。ですから覚悟を決めて臨んだ当日の第一試合で、次々に矢をポットに入れることができたときは本当に感激! 続く2つの試合では心に余裕ができ、試合状況を見ながら的確な判断を行って勝利を収めることができました。準決勝では、対戦相手の見事な試合運びもあって負けてしまいましたが、大会全体を通じて練習の成果を存分に出すことができたと思います。また、サポートチームを含めた全体のチームワークは、他のどの学校にも負けていなかったと胸を張れます。
プロジェクトRの活動に参加することで私は、授業の範囲を超えたハイレベルな知識や技術を身につけることができました。また、他のメンバーと意見を交換する中で視野や考え方が広がり、柔軟な発想力が養われたことを実感しています。すでに次回のNHK学生ロボコンのテーマは発表されています。2021年大会で本学は強豪校の一角に名を連ね、他校からマークされる存在になったはず。次はさらに独創的で強いロボットを作るのが目標です。女子、男子を問わず少しでも興味がある人は、ぜひ私たちと一緒に頂点をめざしましょう!
プロフィール
梅村 留奈
田園調布学園高等部出身(東京都)。昔から宇宙や航空工学に興味があり、好きな映画はスターウォーズシリーズ。将来の夢も、宇宙で活躍するロボットを開発すること。休日はアクセサリー作りや料理・お菓子作りに励む、根っからのものづくり大好き女子。